Programinė įranga Screenshot:
Programinė detalės:
Versija: 1.0.2
Įkėlimo datą: 15 Apr 15
Kūrėjas: Dihav
Licencija: Nemokamai
Populiarumas: 92
Dydis: 11911 Kb
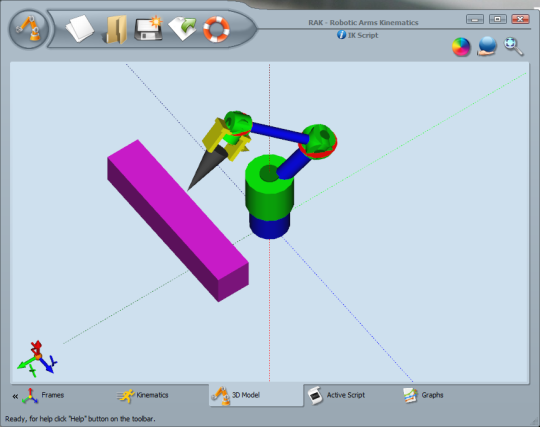
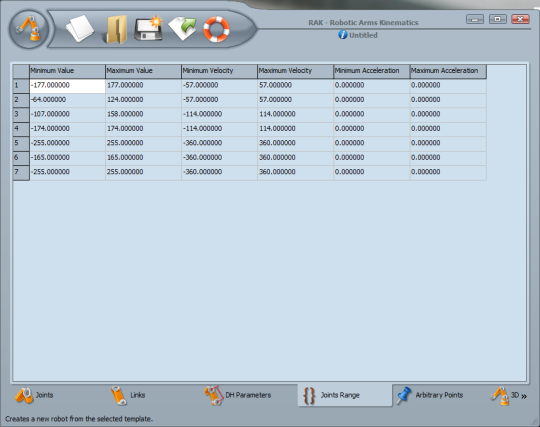
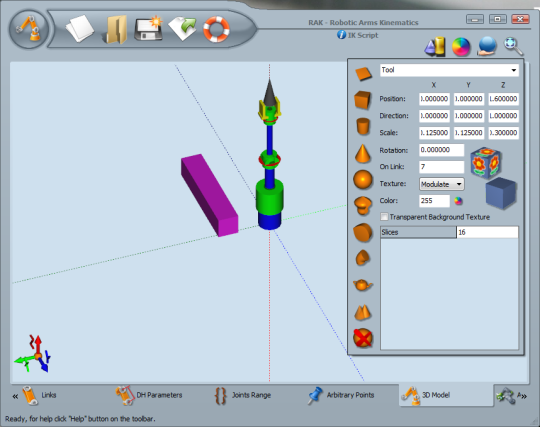
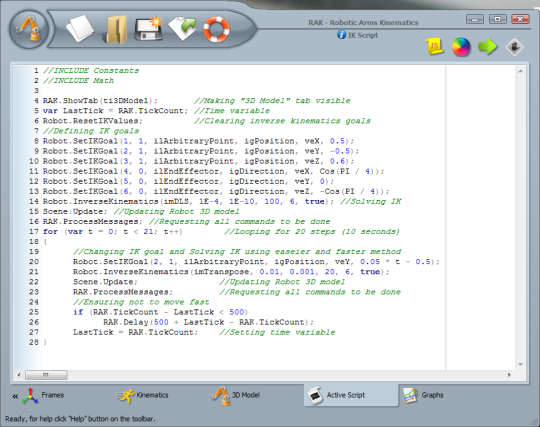
RAK yra modeliuojant robotų rankas ir apskaičiuoti savo kinematiniai programa.
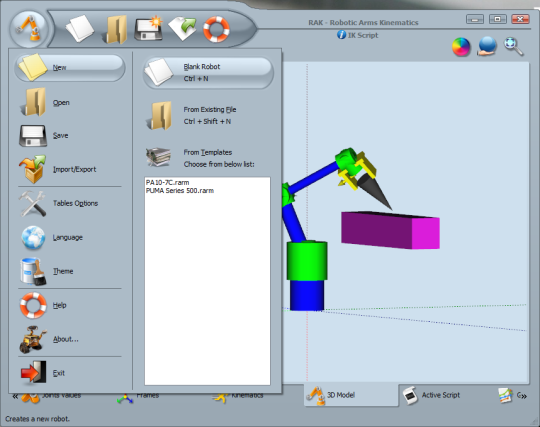
Ši programa gali imituoti atvirojo kontūro, vienoje grandinėje robotus.
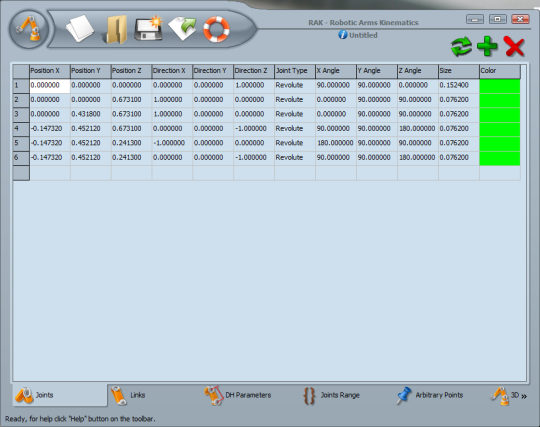
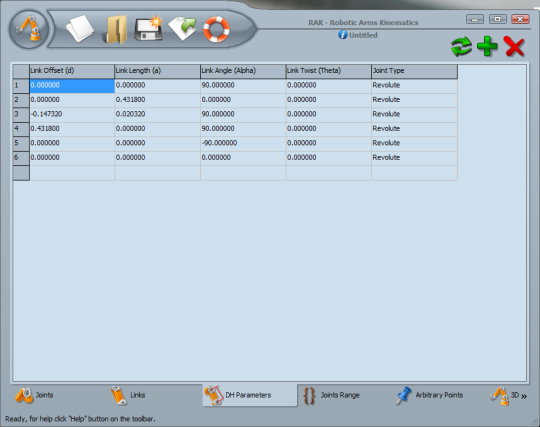
Jūs galite modeliuoti robotą jos sąnarių pozicijų arba Denavit-Hartenberg (DH) parametrus.
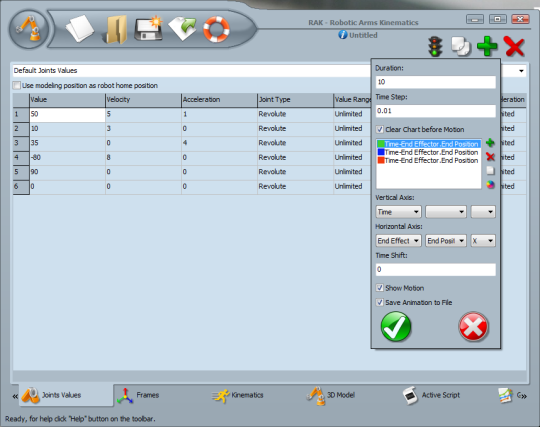
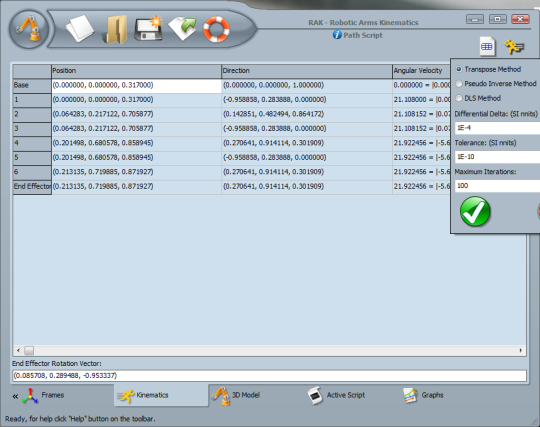
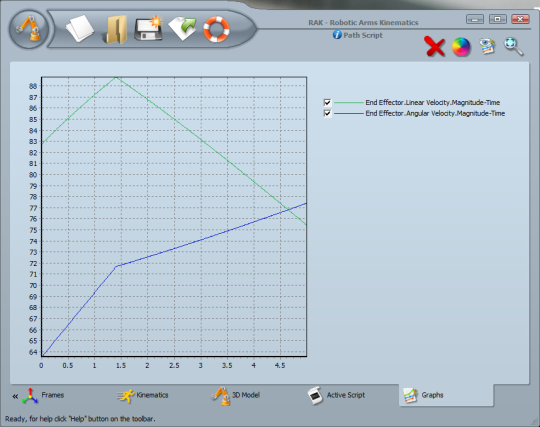
Jūs galite apskaičiuoti kinematiniai ir Žymėti Kinematika robotas pagal šią programą.
Taip pat programavimas plotas rašyti programas ir kontroliuoti realias robotus.

Komentarai nerastas