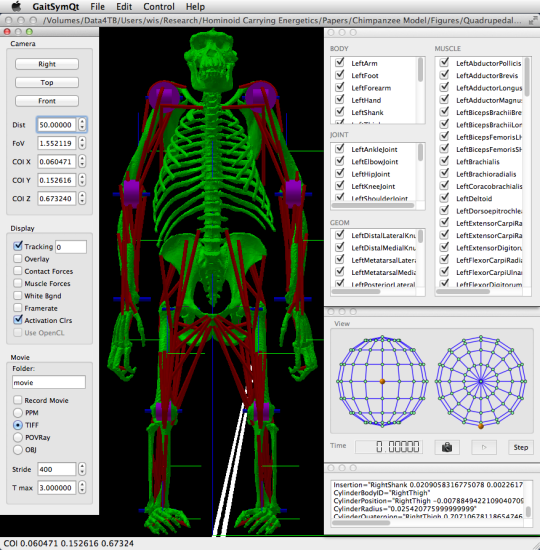
GaitSym yra į priekį dinaminio modeliavimo programa. Ką tai reiškia, kad jūs nurodote jėgas ir programa naudoja Niutono dėsniai apskaičiuoti judesius. Jūs galite jį atsisiųsti iš čia įskaitant žmogaus ir ne žmogaus 2D ir 3D modelių asortimentą jums pradėti. Jis naudoja Open Dynamics Engine fizikos variklis daryti dauguma sunkaus darbo ir suteikia failo formatą ir rodymo sistemą, vartotojas neturi daryti jokio programavimo. Ji taip pat teikia įvairias raumenų modelius taip, kad jėgos gali būti generuojami tiesiai iš raumenų aktyvumo lygio ir kabliukų skaičius, kad jis galėtų būti naudojamas su globalios optimizacijos priemones, tokias kaip genetinių algoritmų. Jo pagrindiniai bruožai yra šie: greitas, lankstus ir Tvirtas priekį Dinaminis modeliuotojas; Sudėtingos Susisiekite sistema; Minetti-Aleksandras ir Umberger-Gerritsen-Martin Raumenų modeliai apykaitos sąmatinė; Via Taškai ir cilindro pakavimas raumenims keliai; Inercinės Tensor Apskaičiuoti iš Trikampės Mesh Apybraiža; Pasaulio ar vietos koordinačių sistemos efektyvaus modelio kūrimas. Pilnas Originalus kodas Įtraukimas (C ++ kaupia ant MacOSX, Windows, Linux ir kitų Unix sistemose); Užbaigti su žmogaus ir ne žmogaus 2D ir 3D modelių įvairovė; Gamina aukštos kokybės nuotraukas ir animacijos per išorinį Ray-sekimo
Kas naujo , šioje laidoje:.
- Naujas slankiklį bendra
- Naujas raumenų modelis įskaitant sausgyslės slopinimo, aktyvinimo kinetiką, nelinijinių pavasario atsaką bei geresnio skaitmeninio stabilumo
- Nauja dėžutė automobilių vairuotojai
- Naujas langas geom
- Naujas raumenų dirželis, kuris gali wrap apvalios dviejų lygiagrečių cilindrai
- Tiesioginis taškas debesis vizualizacija
- Nutraukti nuo pernelyg vyrių bendrų ribinių momentai, arba duomenys tikslinių ribų
- Stebėjimo pozicija galima kompensuoti centralizuoti Vikšriniai modeliavimas

Komentarai nerastas